%20(1)%20(1).png)

Tactical Unmanned helicopter
Alpha A800
Compact, lightweight and quick to deploy.


A800 Lightweight Tactical Unmanned Helicopter
The fuel-powered Alpha 800, at less than 14 kg MTOW, is the most reliable UAV helicopter in its class. Similar in capabilities to a manned helicopter, it features a much lighter logistical footprint, far lower maintenance requirements and overall operation costs.
The complete A800 system is easily transported in a standard pick-up/van and is ready to deploy in minutes. Redundant safety measures and fully automatic autorotation ensure safe flights and landings.
- Light, resistant chassis
- Fully autonomous flight
- 2.5 hour autonomy
- 50km + range
- Flexible 2.5kg payload options
A800 Specifications

Endurance
Fly for more than 2.5 hours.

Payload
Carry 2kg of advanced sensors.

Deployment
Be in the air in less than 15 minutes.

Fuel-powered
Extend your mission range.

Autonomy
Execute fully automated flights.


Ready to find out more about the A800 UAV helicopter?
Contact us
Alpha A800 Mission Profiles
The A800 tactical UAV helicopter system, including Ground Control Station and tracking antenna, can be deployed in less than 15 minutes. Advanced onboard EO/IR sensors make the A800 a powerful platform for a range of surveillance applications.

Maritime Surveillance

Reconnaissance
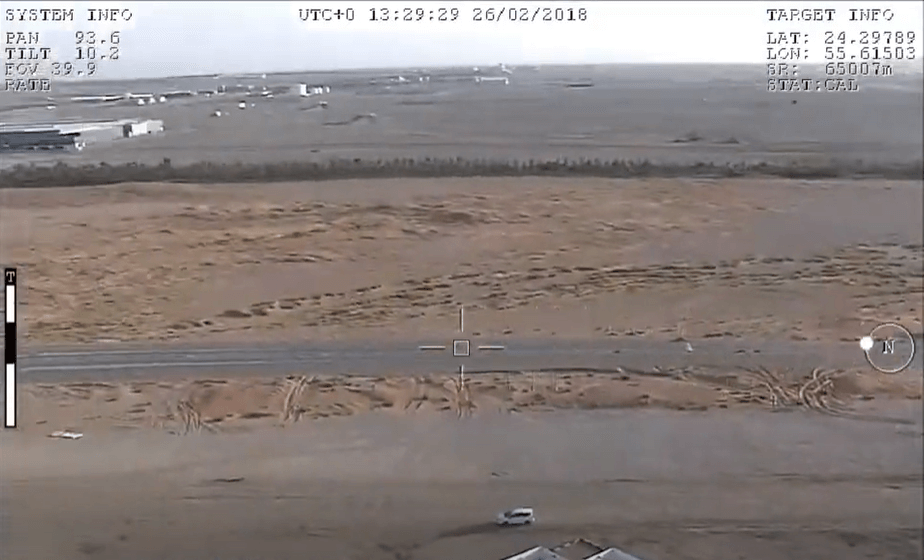
Border Control

Search & Rescue Operations

Natural Disaster Response

Key Infrastructure Inspection

LiDAR Mapping
Alpha A800 in Action






No items found.
.svg)


.png)